A Simple 4 DOF Robotic Arm
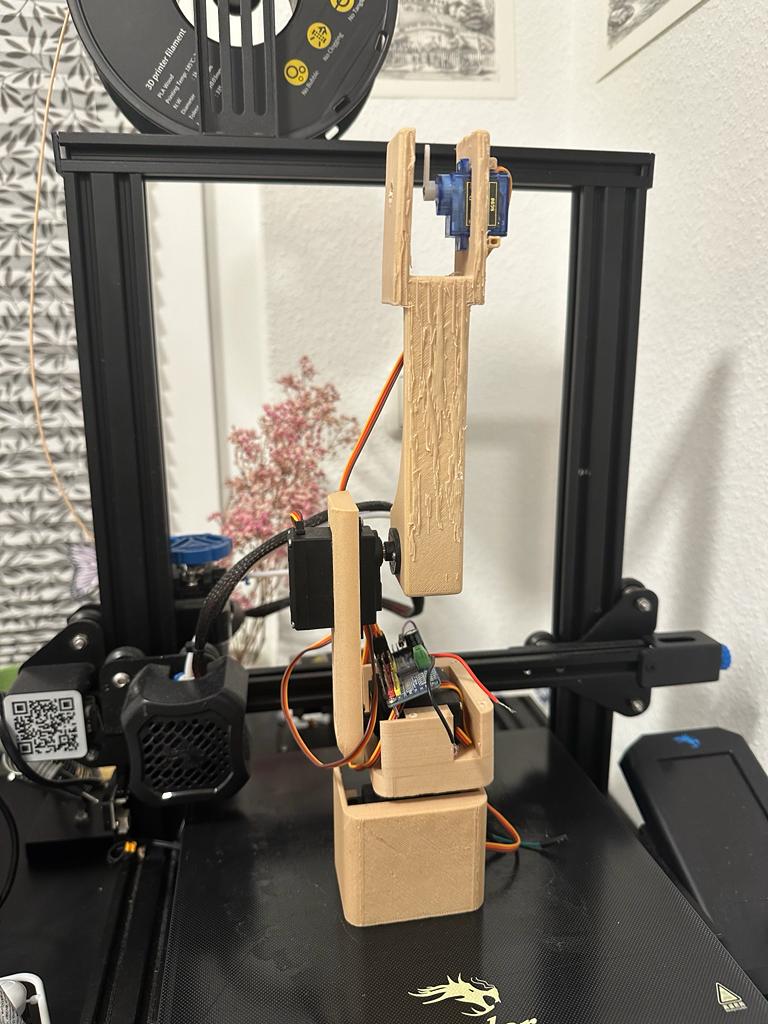
A simple 3D printed robot arm (modified version of the UMIRobot). The control of the arm is done using a simple implementation of an inverse jacobian controller.
1. Mechanical design
This arm is a simple modified version of the 5 DOF UMIRobot. Since I didn't have enough motors, I welded two joints in blender instead of having a motor linking them.